Chapter 4 MotioN In A Plane
CHAPTER NO.4 MOTION IN A PLANE
4.1 INTRODUCTION
In the last chapter we developed the concepts of
position,displacement, velocity and acceleration that are needed to describe
the motion of an object along a straight line. We
found that the directional aspect of these
quantities can be taken care of by + and - signs, as in one dimension only two
directions are possible. But in order to describe motion of an
object in two dimensions (a plane) or three
dimensions (space), we need to use vectors to deacribe the above-
mentioned physical quantities. Therefore, it is
first necessary
to learn the language of vectors. What is a vector?
How to add, subtract and multiply vectors ? What is the result of
multiplying a vector by a real number ? We shall
learn this te enable us to use vectors for defining velocity and
acceleration in a plane. We then discuss motion of
an object ina plane. As a simple case of motion in a plane, we shall discuss
motion with constant acceleration and treat in detail
the projectile motion. Circular motion is a familiar
class of motion that has a special significance in daily-life situations.We
shall discuss uniform circular motion in some detail.The equations developed in
this chapter for motion in a plane can be easily extended to the case of three
dimensions.
4.2 SCALARS AND VECTORA
In physics, we can classify quantities as scalars or
vectors. Basically, the difference is that a direction is
assoctated with a vector but not with a scalar. A
scalar quantity is a quantity with magnitude only. It is specified
completely by a single number, along with the proper
unit. Examples are : the distance between two points,mass of an object, the
temperature of a body and the time at which a certain event happened. The rules
for combining scalars are the rules of ordinary algebra.Scalara can be
added,aubtracted, multiplied and divided just as the ordinary numbers*. For
example,if the length and breadth of a rectangle are
1.0 m and 0.5 m respectively, then its
perimeter is the sum of the lengths of the four
sides, 1.0m+05m+10m+05m=
3.0 m. The length of each side is a scalar and the
perimeter is also a scalar. Take another example: the maximum and minimum
temperatures on a particular day are 35.6 °C and 24.2 °C respectively. Then,the
difference between the two temperatures
is 11.4 °C. Similarly, if a uniform solid cube of
aluminium of side 10 cm has a mass of 2.7 kg, then its volume is 10° m® (a
scalar)and its density is 2.7x10° kg m= (a scalar).
Avector quantity is a quantity that has both a
magnitude and a direction and obeys the triangle law of addition or
equivalently the parallelogram law of addition. So, a vector is specified by
giving its magnitude by a number
and its direction. Some physical quantities that are
represented by vectors are displacement,velocity, acceleration and force.
To represent a vector, we use a bold face type in
this book. Thus, a velocity vector can be represented by a symbol v. Since bold
face is difficult to produce, when written by hand, a vector is often
represented by an arrow placed
over a letter, say U. Thus, both w and v
represent the velocity vector. The magnitude of a
vector is often called ita absolute value,indicated by Iw! = v. Thus, a vector
is represented by a bold face, e.g. by A, a, p,q, & «..x, y, with
respective magnitudes denoted by light
face A, @, p, GT, ...% Y.
4.2.1 Position and Displacement Vectors
To describe the position of an object moving in a
plane, we need to choose a convenient point,say O as origin. Let P and P’ be
the positions of the object at time tand f’, respectively [Fig. 4.1(a)].We join
O and P by a straight line. Then, OP is the position vector of the object at
time t. An arrow is marked at the head of this line. It is represented by a
symbol r, i.e.OP=r. Point P’ is
Tepresented by another position vector, OP’ denoted
by r’. The length of the vector r Tepresents the magnitude of the vector and
its direction is the direction in which P les as seen
from ©. If the object moves from P to P’, the vector
PF’ (with tail at P and tip at P’) is called the displacement vector corresponding
to motion from paint P {at time 9 to point P’ fat time 7).

It is important to note that displacement vector is
the straight line joining the initial and final positions and does not depend
on the actual
path undertaken by the object between the two
positions. For exampke, in Fig. 4.1b, given the initial and final positions as
P and Q, the displacement vector is the same Pg for different
paths of journey, say PABCQ, PDQ, and
PBEFQ.Therefore, the magnitude of displacement is either less or equal to the
path length of an abject between two points. This fact was emphasised in the
previous chapter also while discussing motion along a straight line.
4.2.2 Equality of Vectors
Two vectors A and B are said to be equal if, and
only if, they have the same magnitude and the same direction.**
Figure 4.2(a} shows two equal vectors A and B. We
can easily check their equality. Shift B parallel to itself until its tail Q
coincides with that
of A, i.e. Q coincides with O. Then, since their
tips S and P also coincide, the two vectors are said to be equal. In general,
equality ia indicated
as A=B., Note that in Mig. 4.2(b). vectora A’ and B’
have the same magnitude but they are not
equal because they have different directions.Even if
we shift B’ paralle] to ttself so that its tail 0 coincides with the tail O’ of
A’, the tip S’ of B’
does not coincide with the tip P’ of A’.
4.3 MULTIPLICATION OF VECTORS BY REAL
NUMBERS Multiplying a vector A with a positive
number 1.gives a vector whose magnitude is changed by the factor 4 but the
direction is the same as that
ofA:laal =a lal tta>o.
For example, ifAis multiplied by 2, the resultant
vector 2A is in the same direction as Aand has a magnitude twice of |Al as
shown in Fig, 4.3(a).
Multiplying a vector A by a negative number 1 gives
a vector 1A whose direction is opposite to the direction of A and whose
magnitude ia -\ times IAI.
Multiplying a given vector A by negative
numbers, say -1 and -1.5, gives vectors aa shown in
Fig 4.3(b).
The factor 4 by which a vector A is multiplied could
be a scalar having {ts own physical dimension. Then, the dimension of 4 A ia
the product of the dimensions of 4 and A. For example, ifwe multiply a constant
velocity vector by duration (of time), we get a
displacement vector.
4.4 ADDITION AND SUBTRACTION OF
VECTORS — GRAPHICAL METHOD
As mentioned in section 4.2, vectors, by definition, obey the triangle law or
equivalently,
the parallelogram law of addition. We shall now
describe this law of addition using the graphical method. Let 113 consider two
vectors Aand B that
lie in. a plane as shown in Fig. 4.4(a). The lengths
of the line segments representing these vectors are proportional to the
magnitude of the vectors.To find the sum A+ B, we place vector B so that its
tail is at the head of the vector A, as in Fig. 4.4(b). Then, we join the tafl
of A to the head
of B. This line OC represents a vector R, that is,the sum of the vectors A and B. Since, in this procedure of vector addition, vectors are

arranged head to tail, this graphical method ts called the head-to-tail method. The two vectors and their resultant form three sides ofa triangle.so this method fs also known as triangle method
of vector addition. If we find the resultant of B +
Aas in Fig. 4.4(c), the same vector R is obtained. Thus, vector addition is
communtative:
A+B=BrtaA (4.1)
The addition of vectors also obeys the associative
law as illustrated in Fig. 4.4(d). The result of adding vectors A and B first
and then adding vector C is the same as the result of adding B
and C first and then adding vector A:
(A+B) +C=A+ (B+C) (4.2)
What is the result of adding two equal and opposite
vectors ? Consider two vectors Aand -A shown in Fig. 4.3(b). Their aum is A +
(-A).Since the magnitudes of the two vectors are the
same, but the directions are opposite, the resultant
vector haa zero magnitude and is represented by 0 called a null vector or a
zero vector :
A-A=0 lol=0 (4.3)
Stoce the magnitude of a null vector is zero, its
direction cannot be specified.
The null vector also results when we multiply a
vector A by the number zero. The main properties of O are :
AtO=A
140=0
OA=0 (4.4)
What ts the physical meaning of a zero vector?
Consider the position and displacement vectors ina
plane as shown in Fig. 4.1 fa). Now suppose that an object which fs at P at
time t, moves to P and then comes back to P. Then, what is its
displacement? Since the initial and final positions
coincide, the displacement {s a “null vector",
Subtraction of vectors can be defined in terms of
addition of vectors. We define the difference of two vectors A and B as the sum
of two vectors Aand -8:
A-B=A+(3B) (4.5)
It is shown in Fig 4.5. The vector -B is added to
vector A to get R, = (A- 8). The vector R= A+B is also shown in the same figure
for comparison.We can also use the parallelogram method to
find the sum of two vectors. Suppose we have two
vectors A and B. To add these vectors, we bring their tails to a common origin
O as shown in Fig. 4.6{a). Then we draw a line from the head of A parallel to B
and another line from
the head of B parallel to A to complete a
parallelogram OQSP. Now we join the point of the intersection of these two
lines to the origin O, The resultant vector R is directed from the
common origin 6 along the diagonal (OS) of the
parallelogram [Fig. 4.6(b)]. In Fig.4.6(c), the triangle law is used to obtain
the resultant of A and 8 and we see that the two methods yield the
same result. Thus, the two methods are
equivalent.


Example 4.1 Rain is falling vertically with a speed
of 35 m s°. Winds starts blowing after sometime with a speed of 12 ms" in
east to west direction. In which direction should a boy waiting at a bus stop
hold his umbrella ?
Answer The velocity of the rain and the wind are
represented by the vectorsv,andv_,in
Fig.
4.7 and are in the direction specified by the
problem. Using the rule of vector addition, we see that the resultant ofv, and
v, is R as shown.in the figure. The magnitude of R is Rev + ts ¥357 +127 ms!
=37ms"! The direction @ that R makes with the vertical is given by
tang= 2 = 12 0343
v, 35
Orn ¢=tan{0.343)=19°
Therefore, the boy should hold his umbrella in the
vertical plane at an angle of about 19° with the vertical towards the east. 5
4.5 RESOLUTION OF VECTORS
Let a and b be any two non-zero vectors in a plane
with different directions and let A be another vector in the same planefFig.
4.8). Acan De expressed as a sum of two vectors -— one obtained by multiplying
a by a real number and
the other obtained by multiplying b by another Teal
number. To see this, let O and P be the tail and head of the vector A. Then,
through O, draw a straight line paralle] to a, and through P, a straight line
parallel to b. Let them intersect at Q. Then, we have
A=OP =-09+9P (4.6)
But since OG is parallel to a, and QP is parallel to
b, we can write :
O09 = Aa, and @P=pb (4.7)
where A and pare real numbers.Therefore, A=Aa+pb
(4.8)
We say that A haa been resolved into two
component vectors 4a and ub along a and b
Tespectively. Using this method one can resolve a given vector into two component
vectors along a set of two vectors — all the three lie in the same
plane. It is convenient to resolve a general vector
along the axes of a rectangular coordinate system using vectors of unit
magnitude. These
are called unit vectors that we discuss now.
Unit vectors: A unit vector is a vector of unit
Magnitude and points in a particular direction.It has no dimension and unit.
Itis used to specily
a direction only. Unit vectors along the x-, y-and
z-axes of a rectangular coordinate system are denoted by i, j and k,
respectively, as shown in Fig. 4.9(a).
Since these are unit vectors, we have
lil =lil=lel= 4.9)
These unit vectors are perpendicular to each other.
In this text, they are printed in bold face with a cap (A) to distinguish them
from other vectors. Since we are dealing with motion in two dimensions in this
chapter, we require use of only two unit vectors. If we multiply a unit
vector,say m bya scalar, the result ie a vector 4=101. Ingeneral, a vector Acan
be written as A=IAla (4.10) where ® is a unit vector along A.
We can now resolve a vector A in terma
of component vectors that lie along unit vectors i
and j. Consider a vector A that Hes in xy plane as shown in Fig. 4.9(b). We
draw lines from the head of A perpendicular to the coordinate
axes as in Fig. 4.9(b), and get vectors A, and
A,such that A, + A,=A Since A, is parallel to i and A, is parallel to j, we
have :
A=A,i, A=A,j (4.11)where A, and A, are real
numbers.Thus, A=A,i+A, j (4.12)
This is represented in Fig. 4.9(c). The quantities
A, and A, are called x-, and y- components of the vector A. Note that A, is
tiself not a vector, but
A, i 18 a vector, and so is A, j. Using simple
trigonometry, we can express A, and 4 in tems of the magnitude of A and the
angle 6 it makes with the x-axis :
A, =Acos @
A,=Asin 6 (4.13)
As is clear from Eg. (4.13), a component of a vector
can be positive, negative or zero depending on the value of 0.
Now, we have two ways to specify a vector A in a
plane. It can be specified by :
(} ite magnitude A and the direction 6 it makes with
the x-axis; or
(i) its components A, and A,IfAand 6 are given,
A,and A, can be obtained using Eq. (4.13). If A, and A, are given, Aand 8 can
be obtained as follows :
AP sa? = A*cos’0+ A’sin”@
=A! :
Or, As (a? + Ar (4.14)
And tane= tt, 6a tan {e (4.15)
A, A, °
So far we have considered a vector lying in an xy plane. The same procedure can be used to resolve a general vector A into three components along x-, y-, and z-axes in three dimensions. If a, f, and ¥ are the angles*between A.and the x-, y-, and z-axes, respectively Fig. 4.9(d), we have

“AY =Acos@, A, =Acosf. A, =Acosy (4.16a)In general, we have
A=AAi+Aj+ Ak (4.16b)The magnitude of vector A is A=
{# + Ai +A; (4.16c)
A position vector r can be expressed as
r=xityj+zk (4.17) where x, y, and zare the
components ofr along x, Yy-, zZ-axes, respectively.
4.6 VECTOR ADDITION - ANALYTICAL
METHOD Although the graphical method of adding
vectors helps us in visualising the vectors and the resultant vector, it is
sometimes tedious and has limited accuracy. It is much easier to add vectors by
combining their respective components.Consider two vectors A and B in x-y plane
with components A, A, and B,, B,:A=Ai+A,) (4.18)
B= B,i+B,j
Let R be their sum. We have
R=-A+B
=(a,i+ A,j)+(B it Bj) (4.198)
Since vectors obey the commutative and
associative laws, we can arrange and regroup the
vectors in Eq. (4.19) as convenient to us :R=(A, +B,)}i+ (4, + B,)j
(4.19b)SinceR = R,i+R,j (4.20)
we have, R, = A, + B,. R, =A, +B, (4.21)
Thus, each component of the resultant
vector R is the sum of the corresponding
components of Aand B.In three dimensions, we have
A=A,i+A,j+ Ak
B= B,i+B,j+ Bk R= A+B= Ri+R,jt Rk
with R, =A, +B,(Ry = Ay + By
‘R,=A,+B, (4.22)
This method can be extended to addition and subtraction
of any number of vectors. For example, ff vectors a, b and ¢ are given as as
a,ita,j+ ak
b=b,it+b, J+ bk ce Cyd + Cy + ck (4.23a)
then, a vector T = a + b - c has componenta :Ty
Ba,+b,-c,Ty Sy t by Cy (4.23b)T, =@, 4b, -C,
Example 4.2 Find the magnitude and
direction of the resultant of two vectors A and B in
terms of their magnttudes and angle @ between them.
Answer Let OP and O@ represent the two vectors Aand
B making an angle 6 (Fig. 4.10). Then,using the parallelogram method of vector
addition, 08 represents the resultant vector R :R=-A+B
SN is normal to OPand Pi is normal to OS.From the
geometry of the figure,
OS = ON + SNP but ON=OP+ PN=A+ Bcos @
SN=Bain @OS = (A+ Bcos @? + (Bain g?
or, R= A’ + B’ + 2AB cos @ R= A?+B + 2ABcos0
(4.24a)INnAOSN, SN= OS sine =Rsing, and in APSN, SN= PSsin @=B sin 6
Therefore, Rsin a = Bain @R B
ing sina (4.24b)Similarly,PM=A sine =B ainf A |B Or,
Sind sina (4.24c)
Combining Eqs. (4.24b) and (4.24c), we get RA LB
sing sin ~ sina (424d)
Using Eq. (4.24d), we get:
sin a= —sin 8 (4.24e)
where R ts given by Eq. (4.24).
_ SN ____siBsin@é on tan@=05 > PN ~ A+ Bcos@
(4.244 Equation (4.24a} gives the magnitude of the resultant and Eqs. (4.24¢)
and (4.249 fts direction.
Equation (4.24) is known as the Law of cosines and Eq.
(4.24d) as the Law of sines. <
Example 4.3 A motorboat is racing
towards north at 25 km/h and the water
current in that region 1s 10 km/h in the
direction of 60° east of south. Find the
resultant velocity of the boat.
Answer The vector v, representing the velocity of
the motorboat and the vector v, representing the water current are shown in
Fig. 4.11 in directions specified by the problem. Using the
parallelogram method of addition, the resultant R is obtained in the direction shown in the figure.

We can obtain the magnitude of R
using the Law of cosine :pe fds 242 R= Yfupyt vet Ayu, 008l120° = 25? +107
+2x25x10(-1/2) = 22 km/h
To obtain the direction, we apply the Law of sines
sin 8 = sing or, sin ¢= zo 6 ~ 1oxsini20’ —10g3 = = ——_ £ 0.397
21.8 2x21.8 $= 23.4 <
4.7 MOTION IN A PLANE
In this section we shall see how to describe motion
in two dimensions using vectors.
4.7.1 Position Vector and Displacement
The poattion vector r of a particle P located ina
plane with reference to the origin of an x-y reference frame (Fig. 4.12) is
given by rexityj where xand y are components of r along x-, and
y- axes or simply they are the coordinates of the
object.
Suppose a particle moves along the curve shown by
the thick line and is at P at time ¢t and P’ at time ¢ [Fig. 4.12(b)]. Then,
the displacement is :ar =P -F (4.25) and is directed from P to P’.
We can write Eq. (4.25) in a component form:ar
=(vity'j)-(xi+y))
= iAx+ jay
where Ax=x'-x, ay=yf-y (4.28)
Velocity The average velocity (v} of an object is
the ratio of the displacement and the corresponding time interval :
vee I aan
At At At At
Or v-t.i+ b,j
—_ 4
Since = 7. the direction of the average velocity is
the same as that of ar (Fig. 4.12). The velocity (instantaneous Velocity} is
given by the limiting
value of the average velocity as the time interval
approaches zero :
Ar_ dr
v~ Phat dt 4.28)
The meaning of the limiting procesa can be easily
understood with the help of Fig 4.13(a) to (d). In these figures, the thick
line represents the path
of an object, which is at Pat timet P,, P, and P,
represent the positions of the object after times Af At,, and At,. Ar,, Ar,,
and Ar, are the displacements of the object in times Af,, Ai,, and

At,, respectively. The direction of the average
velocity V 1s shown in figurea {a). (b) and (c) for three decreasing valuca of
st, Le. At,.at,, and At,
{at, > at, > at). As at > 0, ar + O
and is along the tangent to the path Fig.
4.13()].Therefore, the direction of velocity at any point on the path of an
object is tangential to the path at that point and is in the direction of
motion.We can express v in a component form :
/ dr
v=—
dt
, Ax, Ay:
= lim|—i+—j (4.29)
Atm Al Al
=i lim aj lim Ay
Ate At At-0 At
dx dy | fan
Or v=i di +j dt vAt vj
, dx dy
where Us Yu = ae (4.30a)
So, if the expressions for the coordinates x and y
are known as functions of time, we can use these equations to find v, and
v,,The magnitude of v is then ve yext uy (4.30b)and the direction of v is given
by the angle 6:, ly -1 by
tan@=——, @=tan |— (4.30c)
uy by,
v, ¥, and angle @are shown in Fig. 4.14 for a
velocity vector v.
Acceleration
The average acceleration a of an object fora time
interval At moving in x-y plane is the change in velocity divided by the time
interval :
A vite, j > . Avy,
poor Medtend) ae Ate (4.31a)
Ai At At At
* in terms of x and y, a, and a, can be expressed as
| f(y Peg fan) ey
fer alal a2 ala) ae

Or, aza,ita,j.
{4.31b)
The acceleration (instantaneous acceleration)is the
Itmiting value of the average acceleration as the time interval approaches zero
:
, li Av
a= lim — 4,32:
Aimo At ¢ a)
Since Av = Av,i + Av ybwe have
oo, Av.» Av,
a=i lim See yj lim —*
dio At aio At
Or, a=a,ita,j (4.32)
, dv, dv,
where, a,=—, a, =— (4.32c)*
dt ~ dt
As in the case of velocity, we can understand
graphically the limiting process used in defining acceleration on a graph
showing the path of the
object's motion. This is shown in Figs. 4.15(a) to
(@). P represents the posttion of the object at time ¢ and P,, P., P, positions
after time At, Ai,
Af,, respectively (Af > At>At). The velocity
vectors at points P, P,. P.. P, are also shown in Figs. 4.15 (a), (b) and (c).
fn each case of At, Avia
obtained using the triangle law of vector
addition.By definition, the direction of average acceleration is the same as
that of Av. We see that as At decreases, the direction of Av changes
and consequently, the direction of the
acceleration changes. Finally, in the limit Af0

Fig. 4.15(d), the average acceleration becomes the
instantaneous acceleration and has the direction as shown.Note that in one
dimension, the velocity and
the acceleration of an object are always along the
same straight line (either in the same di-rection or in the oppoaite
direction). However,for motion in two or three dimensions, veloc-ity and
acceleration vectors may have any
angle between 0° and 180° between them.
Example 4.4 The posttion of a particle is given by
r= 3.0ti+2.0t77+5.0E
where ¢ is tn seconds and the coefficients have the
proper units for r to be tn metres.(a) Find v(§ and a( of the particle. (b)
Find the magnitude and direction of v(§ at t=1.0s.Answer : 1 1 . yr
.w(0=—=—(3.0 142.007 545.0 i)
dt dt = 3.0i+ 4.04 a (Qa 242.0)
dt a=4.0m s° along y- direction
At t=1.08, v=3.0i+4.0j It's magnitude is v=¥3° +4
=5.0ms"!and direction ts
4.8 MOTION IN A PLANE WITH CONSTANT
ACCELERATION
Suppose that an object is moving in x-y plane and
its acceleration a is constant. Over an interval of time, the average
acceleration will equal this constant value. Now, let the velocity
of the object be vy at time t= 0 and vw at time £
Then, by definttion
azvivo_¥-vo
aet-0
Or, v=v,tat (4.33a)
In terma of components :
‘Ly = Vox + Axl
ty HU yy Fl (4.33)
Let us now find how the position r changes with
time. We follow the method used im the one-dimensional case. Let r, and r be
the position vectors of the particle at time 0 and t and let the
velocities at these instants be v, and v. Then,over
this time interval t, the average velocity is (v, + v)/2. The displacement is
the average velocity multiplied by the time interval :
rn -( je-[ +at)ivg le
2) 4 2 }
= Vol + 5 al"
, 1,
Or, FetytVol+7 al” (4.34a)
It can be easily verified that the derivative of Eq.
(4.34a), ie. = gives Eq.(4.33a) and it also satisfies the condition that at tO,
r = r,.
Equation (4.34a) can be written in component
form as
X= Xqtvytt+ iat"
Y= Yo + v,,0+ 5a,t° (4.34b)
One immediate interpretation of Eq.(4.34b) 1s that
the motions in ~ and y-directions can he treated independently of each other.
That is, motion in
a plane (two-dimensions) can be treated as two
separate simultaneous one-dimensional motions with constant acceleration along
two perpendicular directions. This is an important
result and is useful in analysing motion of objects
in two dimensions. A similar result holds for three dimensions. The choice of
perpendicular directions is convenient in many physical sthuations, as we shall
see in section 4.10 for
projectile motion.Example 4.5 A particle starts from
origin at t= O with a velocity 5.0fm/s and moves in xy plane under action of a
force which
produces a constant acceleration of
+ | m/s?. (a) What is the y-coordinate of the
particle at the instant
its x-coordinate is 84 m ? (bh) What is the speed of
the particle at this time ?
Answer The position of the particle is given by r
(0) = vot + sat’=5.0it + (1/2)(3.0i + 2.05) @ =(5.0t+1.57)i+1.005
Therefore, x ({)= 5.0¢+ 1.52 ‘y(t)=+1.08
Given x(§ = 84m, t=?
§.0t+150C?=&>t=6s
Att=68, y= 1.0 (6)? =36.0m
Now, the velocity v= Z-(5.0 + 3.00)4+2.08 j
At t=68, v= 23.014+12.0j
speed =|v/=¥23° +12" =26 ms" , 4
4.9 RELATIVE VELOCITY IN TWO
DIMENSIONS
The concept of relative velocity, introduced in
section 3.7 for motion along a straight line, can be eastly extended to include
motion in a plane
or in three dimensions. Suppose that two objects A
and B are moving with velocities v, and v,(each with respect to some common
frame of reference, say ground.). Then, velocity of object
Arelative to that of B is :V.n=¥,— ps (4.35a)and
similarly, the velocity of object B relative to that of Ais:
Van = VV Therefore, v,, =— Vi» (4.35b)
and, |v 4,|={Vpa| {4.38c)p> Example 4.6 Rain is
falling vertically with
a speed of 35 ms". Awoman rides a bicycle with
a speed of 12 ms" in east to west direction. What is the direction in
which she should hold her umbrella ?
Answer In Fig. 4.16 v, represents the velocity of
rain and v, , the velocity of the bicycle, the woman is riding. Both these
velocities are with
respect to the ground. Since the woman is riding a bicycle, the velocity of rain as experienced by

her is the velocity of rain
relative to the velocity of the bicycle she is riding. That is v, =v_- ¥,
This relative velocity vector as shown in Wig. 4.16
makes an angle @ with the vertical. It is given by
, vu, 12
tan @=—— =— = 0.343
v, 35
Or, 6219
Therefore, the woman should hold her
umbrella at an angle of about 19° with the vertical
towards the west.
Note carefolly the difference between this Example
and the Example 4, 1. In Example 4.1, the boy experiences the resultant (vector
sum) of two velocities while in this example,the woman experiences the velocity
of rain
relative to the bicycle (the vector difference of
the two velocities). <
4.10 PROJECTILE MOTION
As an application of the ideas developed in the
previous sections, we consider the motion of a projectile. An object that is in
flight after being
thrown or projected is called a projectile. Such @
projectile might be a football, a cricket ball, a baseball or any other object.
The motion of a
projectile may be thought of as the result of two
separate, simultaneously occurring components of motions. One component is
along a horizontal
direction without any acceleration and the other
along the vertical direction with constant acceleration due to the force of
gravity. It was Galfleo who first stated this tndependency of the
horizontal and the vertical components of projectile
motion in his Dialogue on the great world systems (1632).
In our discussion, we shall asaume that the air
resistance has negligible effect on the motion of the projectile. Suppose that
the projectile is launched with velocity v, that makes an angle
8, with the x-axis as shown in Fig. 4.17.
After the object has been projected, the
acceleration acting on it fs that due to gravity
which is directed vertically downward:as-gj
Or a,=0,q=-¢ (4.36)
The components of initial velocity v, are :u,, = U,
C08 4,
U, = V, sin 6, (4.87)

If we take the initial position to be the origin of
the reference frame as shown in Fig. 4.17, we
have :
x= 0, Yu, = 0
Then, Eq.{4.47b) becomes :
x=v,t=(u, cos 8) t
and y=(v,sin @,)t-(%)gl (4.38)
The components of velocity at time ¢ can be obtained
using Eq.(4.33b) :
UL =U, =U, C08 O,
v, =v, sin @,-gt (4.39)
Equation (4.38) gives the x-, and y-coordinates of
the position of a projectile at time ¢ in terms of
two parameters — initial speed v, and projection
angle @,. Notice that the choice of mutually perpendicular x-, and y-directions
for the analysis of the projectile motion has resulted tn
a simplification. One of the components of velocity,
i.e. x-component remains constant throughout the motion and only the y-
component changes, like an object in free fall in vertical direction. This is
shown graphically at few instants in Fig. 4.18. Note that at the point
of maximum height, v= 0 and therefore,
v
q=tan''—“=0
vy,
Equation of path of a projectile
What is the shape of the path followed by the
projectile? This can be seen by eliminating the time between the expreasions
for x and y as given in Eq. (4.38). We obtain:
, g :
y = (tan @, )x« ———@———- x
( o) 2 (v,cos@, ) (4.40)
Now, since g, 9, and v, are constants, Eq. (4.40)ts of the form y = a.x +b, in which aand b are constants. This is the equation of a parabola,f.e. the path of the projectile is a parabola (Fig. 4.18).

Time of
maximum height
How much time does the projectile take to reach the
maximum height ? Let this time be denoted by ¢,. Since at this point, v.= 0, we
have from Eq. (4.39):ov, =v, siné,— gt, =0
Or, t,=u,siné/g (4.41a)The total time T, during
which the projectile is
in flight can be obtained by putting y = O in Eq. (4.38).
We get:T22 {u, sin 8, )/g (4.41b)T, is known as the time of flight of the
projectile.We note that T, = 2 £,, which is expected because of the symmetry of
the parabolic path.Maxtmum hetght of a projectile The maximum height h, reached
by the projectile can be calculated by substituting t=t, in Eq. (4.38) :yan
bonnet) fsa)g 2 g
rysind, ?Or, hy, = {erosingo) (4.42)
29 Horizontal range of a projectile
The hortontal distance travelled by a projectile
from fis initial position (x = y =0) to the position where it passes y = O
during {ts fall is called the
horizontal range, R. It is the distance travelled
during the time of flight T, . Therefore, the range Ris R =(v, cos 6) (7)=(u,
cos 8) (2 uv, sin 6)/g
. ve sin 20, Or, R= 97 (4.432)
Equation (4.43a) shows that for a given
projection velocity v,, Ris maximum when ain 26, ia
maximum, 1.c., when 6, = 45°.
The maximum horizontal range is, therefore,. «2 Ry =
g (4.43b)
Exampie 4.7 Galileo, in his book Two new
sciences, stated that “for elevations which exceed or
fall short of 45° by equal amounts, the ranges are equal". Prove this
statement.Answer For a projectile launched with velocity
v, at an angle @, , the range fs given by R= v2
sin2@ g Now, for anglea, (45° + a) and { 45°- a, 20, ia (90° + 2a) and (90° - 2a)
. respectively. The
values of sin (90° + 2a) and sin (G0° - 2a) are the
same, equal to that of cos 20 Therefore,ranges are equal for elevations which
exceed or fall short of 45° by equal amounts a. <>» Example 4.8 A hiker
stands on the edge of a cHff 490 m above the ground and throws a stone
horizontally with an initial speed of 15m s!. Neglecting air resistance,
find the time taken by the stone to reach the
ground, and the apeed with which it hits the ground. (Take g= 9.8m 8%).
Answer We choose the origin of the x-,and y-axis at
the edge of the cliff and t= 0 a at the instant the stone is thrown. Choose the
positive direction of x-axis to be along the initial velocity
and the positive direction of y-axis to be the
vertically upward direction. The x-, and y-components of the motion can be
treated independently. The equations of motion are :x} =x, +u,,t uf) =y,t+u,
t+1/2 a?Here, x, = y, = 0, v,,=0, a,=-g =-9.8m 8%,o,=15ms".The stone hits
the ground when y(t) = — 490 m.-490 m =-{1/2)(9.8) #.This gives t=10s8.
The velocity components are v, =v, and
vj=o,-gt so that when the atone hits the ground
:v,.= 15ms7? vu, =0-9.8x 10=-98ms"Therefore, the speed of the stone is fel
+02 =V15° +98" =99 ms? <
Example 4.9 A cricket ball is thrown at a speed of
28 m s* ina direction 30° above the horizontal. Calculate (a) the maximum
height, fb) the time taken by the ball to return to the same level, and (c) the
distance from the thrower to the point where the ball returns to the same
vel.Answer (a} The maximum height is given by (ve, sine, (28sin 30°)
Mm "3g 8)14x14 “3x9.5" 10.0 m
(b) The time taken to return to the same level is T=
(@ v, sin @,)/g = 2x 28 x sin 30°)/9.8 =28/9.85=2.98(c) The distance from the
thrower to the point
where the ball returns to the same level is R= (vesin
28, ) _ 28x 28x sin 60" -69m g 9.8 <
Neglecting air resiatance - what does
the assimmption really mean?
Whike treating the topic of projectile motion,we
have stated that we assume that the air resistance has no effect on the motion
of the projectile. You must understand what the statement really means.
Friction, force due to viscosity, air resistance are all dissipative forces. In
the presence of any of
such forces opposing motion, any object will lose
some part of its initial energy and consequently, momentum too. Thus, a
projectile that traverses a parabolic path would certainly show deviation from
its idealised trajectory in the presence of air resistance. It will not hit the
ground with
the same speed with which it was projected from it.
In the absence of air resistance, the x-component of the velocity remains
constant and it is only the y-component that undergoes a continuous change.
However,in the presence of air resistance, both of
these would get affected. That would mean that the
range would be less than the one given by Eq. (4.43). Maximum height attained
would also be less than that predicted by Eq. (4.42). Can you then,anticipate
the change in the time of flight?In order to avoid air resistance, we will have
to perform the experiment tn vacuum or under low pressure, which 1s not
easy.When we use a phrase like ‘neglect air
resistance’, we imply that the change in parameters such as range,
height etc. is much smaller than their values without after resistance. The
calculation without air
resistance {8 much simpler than that with air
resistance.
4.11 UNIFORM CIRCULAR MOTION
When an object follows a circular path at a constant
speed, the motion of the object is called uniform circular motion. The word
“uniform” Tefera to the speed, which is uniform (constant}
throughout the motion. Suppose an object is moving
with uniform speed v ina circle of radius Ras shown in Fig. 4.19. Since the
velocity of the object is changing continuously in direction, the
object undergoes acceleration. Let us find the
magnitude and the direction of this acceleration.

Let r and r’ be the postition vectors and wand¥ the
velocities of the object when tt is at point P and as shown in Fig. 4.19{a). By
definition,velocity at a point is along the tangent at that
point in the direction of motion. The velocity
vectors v and w’ are as shown in Fig. 4.19fa1).Avis obtained tn Fig. 4.19 (22)
using the trianglelaw of vector addition. Since the path is circular,v is
perpendicular to r and so is w’ to r’.Therefore, Av is perpendicular to Ar. Since average
acceleration is along A¥ (-*"} the
average acceleration a is perpendicular to Ar. If we
place Av on the line that bisects the angle between r and r’, we see that tt is
directed towards
the centre of the circle. Figure 4.19{(b) shows the
same quanitities for smaller time tnterval. Aw and
hence 4 1s again directed towarda the centre.In Fig.
4.19(c), At-~O and the average acceleration becomes the instantaneous
acceleration, It is directed towards the centre*.Thus, we find that the acceleration
of an object
in uniform circular motion is always
directed.towards the centre of the circle. Let us now find the magnitude of the
acceleration.
The magnitude ofa is, by definition, given by
lal = |Av|
m= As 0 at
Let the angle between position vectors r and
¥ be A@. Since the velocity vectors v and w are
always perpendicular to the position vectors, the angle between them is also A@
. Therefore, the triangle CPP’ formed by the position vectors and
the triangle GHI formed by the velocity vectors v. v
and Av are similar (Fig. 4.19a). Therefore,the ratio of the base-length to
side-length for
one of the triangles is equal to that of the other
triangle. That ta :
Jav| | Ar|
Vv - R
| |ar|
Or, |Av| = e—
R
Therefore,lal- avi eae] oe |x|
= ft 9 Al = Ro RAt Ral o Al
If At is small, A6 will also be small and then arc
PP’ can be approximately taken to be | Ar|:
[Arle vat
larly
At
tr lal
On AlsoAL
Therefore, the centripetal acceleration a, is :(v a,
= [gJe=wve (4.44)
Thus, the acceleration of an object moving with
speed v in a circle of radius R has a magnitude v /Rand is always directed
towards the centre.
This is why this acceleration is called centripetal
acceleration (a term proposed by Newton). A thorough analysis of centripetal
acceleration was
first published in 1673 by the Dutch scientist
Christiaan Huygens (1629-1695) but it was probably known to Newton alao some
years earlier.“Centripetal” comes from a Greek term which means
‘centre-seeking’. Since v and R are constant, the magnitude of the centripetal
acceleration is also constant. However, the direction changes —pointing always
towards the centre. Therefore, a
centripetal acceleration is not a constant vector.We
have another way of describing the velocity and the acceleration of an object
in uniform circular motion. As the object moves
from P to FP’ in time At (= ¢ - 4, the line CP (Fig.
4.19) turns through an angle A@ as shown in the figure. Aé is called angular
distance. We define the angular speed @ (Greek letter omega)
as the time rate of change of angular
displacement ;@= 28 [4.45 At (4.45)
Now, if the distance travelled by the object during
the time At is As, i.e. PP’is As, then :
pe AS
At
but As = RAO. Therefore :
A@
= R—=
v At Ro
v= Rae (4.46)
We can express centripetal acceleration @, in terms
of angular speed :
Fr wR? 2
a, =—=——=@'R
R R a, =o'R (4.47)
The time taken by an object to make one
revolution.is known as fts time period Tand the number of revolution made in
one second is called ita frequency v (=1/T). However, during this time the
distance moved by the object is s = 2nR.
Therefore, v = 2nR/T=2nRv (4.48)
In terms of frequency v, we have
@=2nv
v=2nkv
@,= 4° VR (4.49)
> Example 4.10 An insect trapped in a
circular groove of radius 12 cm moves along the
groove steadily and completes 7 revolutions in 100 s. (a) What is the
angular speed, and the Hnear speed of the motion?
(b) Is the acceleration vector a constant vector ? What is its magnitude ?
Answer This is an example of uniform circular
motion. Here R= 12 cm. The angular speed o is given by
= 2n/T= 2nx 7/100 = 0.44 rad/s
The linear speed v is :
v=o R=0.448'x 12cm= 5.3cms'!
The direction of velocity vis along the tangent to
the circle at every point. The acceleration is directed towards the centre of
the circle. Since this direction changes continuously,
acceleration here ia not a constant vector.However,
the magnitude of acceleration is constant:a= o R= (0.44 9")? (12 cm)= 2.3
cm 8? <
SUMMARY
1. Scalar quantities are quantities with magnitudes
only. Examples are distance, speed,masa and temperature.
2. Vector quantities are quantities with magnitude
and direction both. Examples are displacement, velocity and acceleration. They
obey special rules of vector algebra.
3. Avector
Amultiplied by a real number A 1s also a vector, whose magnitude is A times the
magnitude of the vector Aand whose direction is the same or opposite depending
upon whether 1 is positive or negative.
4, Two vectors Aand B may be added graphically using
head-to-tail method or parallelogram method,
5. = Vector addition is commutative :
A+B=B+A It also obeys the associative taw :(A+B
+CuA+ B+
6. Anal or zero vector is a vector with zero
magnitude. Since the magnitude Is zero, we don't have to specify its direction.
It has the properties :
AtOnA
A0=0
0A=0
7. The subtraction of vector B from A is defined as
the sum of A and -B :
A-B = A+ (-B)
8. Avector Acan be resolved into component along two
given vectors a and b lying in the same plane :Az=Aa+yub where A.and pt are
real numbers.
9. A-unit
vector associated with a vector A has magnitude one and is along the vector A:
. A
i=—
|4|
The unit vectora i, j, _k are vectors of unit
magnitude and point in the direction of the x, y-, and zaxes, respectively in a
right-handed coordinate system.
10. A-vector A can be expressed as
A=A,i+ Ajj where A,, A, are its componente along x-.
and y -axes. If vector A makes an angle 6 , — A,
With the x-axis, then A,= A cos 6, A=Asin 6 and
A=|Al= fal + 45. tan@ ==.
1l. Vectora can be conveniently added using
analytical method. If aum of two vectors A and B, that lie in xy plane, is R,
then :R=R,i+R,j. where, ReA+B,and R«A,+B,12. The position. vector of an object
in xy plane is given by 5 = xit+ uj and the displacement from position r to
position r’ ts given by 4rer-r
=(- x) it(y’—y) j = Axi+Ayj
13. If an object undergoes a displacement Ar in time
At its average velocity is given by ‘Ar Va,” The veloctty of an object at time
tie the limiting valuc of the average velocity
as Attends to zero :
Ar dr
v= Um —=—., It can be written in unit vector
notation as :
At—>Oar dt . dx d de
. : : < L vec dte,j+e,k where Uy Grey = Geet, =e
When position of an object is plotted on a coordinate system, v ia always
tangent to the curve representing the path of the object.14. If the velocity of
an object changes from v to w/in time At, then its average acceleration _ vev'
Av we aven ty: BA ae
The acceleration a at any time tis the limiting
value of a as At—0:
lim Av dv
a= —_—=—
At>O0ar dt
In component form, we have : a= c,i+a,j+a,k , dv,
dey dv,where, 4,.= at tu ar at
15. If an object ‘s moving tn a plane with constant
acceleration a=|al= fae + a3 and ite position vector at time {= 0 fa r,, then
at any other time ¢, it will be at a point given by:
r=4r,+V,f+ lat
oO Oo 2
and its velocity is given by :vev tat where v, is
the velocity at time t= 0 In component form :1 2
X=X%, +0, 04 2a
o TPal to Ge
. ; 1 2
yay, +d,, foe
Uy Bly, $ayt
by = Coy tat
Motion in a plane can be treated as superpasition of
two separate simultaneous one-dimenstonal mations along two perpendicular
directions
16. An object that ts in flight after being
projected 1s called a projectile. If an object is projected with initial
velocity ¥, making an angle 0, with x-axis and if we assume its initial
position to coincide with the origin of the coordinate system, then the
position
and velocity of the projectile at time ¢ are given
by :
x= (v,coa a)t
y = (vu, sin @) £- (1/2) g &
v,= v= 0, cos 6,
v, =v, ain 6,-gt
The path of a projectile is parabolic and is gtven
by :y =(tan@,)x-—__“&___.
2(v, cos 6, )
The maximum height that a projectile attaina is :h,
= (uv, sine, Y
2g
The time taken to reach thie height ia :
tote sing,,
t, =
g
The horizontal distance travelled by a projectile
from its initial poaition to the poaition it passes y = O during its fall is
called the range, R of the projectile. It is:R= 2sin2e,g
17. When an object follows a circular path at
constant speed, the motian of the object ia called uniform circular motion. The
magnitude of its acceleration ia a, = v?
/R. The
direction of a, is alwaya towards the centre of the
circle.The angular speed «, is the rate of change of angular distance. It is
related to velocity
uby v=@R. The acceleration ia a, = @°R.
If T ia the time period of revolution of the object
in circular motion and y 1s its frequency, we have = 2nv, v= 2nvR, a,= 40° °R

POINTS TO PONDER
1. The path length traversed by an object between
two points is, in gencral, not the same as the magnitude of displacement. The
displacement depends only on the end points; the
path length (as the name implies) depends on the
actual path. The two quantities are equal only if the object does not change
its direction during the course of motion. In all other cases, the path length
is greater than the magnitude of displacement.
2. In view of point 1 above, the avernge speed of an
object is greater than or equal to the magnitude of the average velocity over a
given time interval. The two are equal only if the path length is equal to the
magnitude of displacement.
3. The vector equations (4.33a) and (4.34) do not
involve any choice of axes. Of courage,you can always resolve them along any
two independent axea.
4. The kinematic equatiana for uniform acceleration
do not apply to the case of uniform circular motion aince in this case the
magnitude of acceleration ia constant but ita direction is changing.
5. An object subjected to two velocitics v, and v,
has a resultant velocity vw = v, + v,. Take care to distinguish it from
velocity of object 1 relative to velocity of object 2 : v,,= v, — ¥,.
Here v, and v, are velocities with reference to some
common reference frame.
6. The resultant acceleration of an object in
circular motion is towards the centre only if the speed is constant.
7. The shape of the trajectory of the motion of an
object is not determined by the acceleration alone but also depends on the
intftial conditions of motion ( initial position and mitial velocity). For
example, the trajectory of an object moving under the aame acceleration
due to gravity can be a straight line or a parabola
depending on the imitial conditiona.
EXERCISES
4.1 State, for each of the following physical
quantities, if it ie a scalar or a vector :volume, mass, speed, acceleration,
density, number of moles, velocity, angular frequency, displacement, angular velocity.
4.2 Pick out the two scalar quantities in the
following list :force, angular momentum, work, current, linear momentum,
electric field, average
velocity, magnetic moment, relative velocity.
4.3 Pick out the only vector quantity in the
following list :
Temperature, pressure, impulse, time, power, total
path length, energy, gravitational potential, cocfiicient of friction, charge.
4.4 State with reasons, whether the following
algebraic operations with scalar and vector phyaical quantities are meaningful
:
(a) adding any two scalars, (b) adding a scalar to a
vector of the same dimensions ,(9 multiplying any vector by any scalar, (d)
multiplying any two scalars, (ec) adding any two vectors, (9 adding a component
of a vector to the same vector.
4.5 Read each statement below carefully and state
with reasons, if it is true or false :
(a) The magnitude of a vector is always a scalar,
(b) each component of a vector is always ea scalar, (c) the total path length
is always equal to the magnitude of the displacement vector of a particle. (d)
the average speed of a particle (defined as total peth length divided by the
time taken to cover the path) is either greater or equal to
the magnitude of average velocity of the particle
over the same interval of time, (e)Three vectors not lying in a plane can never
add up to give a null vector.
4.8 Establish the following vector inequalities
geometrically or otherwise :(a) «slatbl < Ial + Ibi
(b) lasbl > Ilal-IbI!
(c) la-bl < lal + Ibi
(d) la-bl > Ilal—IbII
When does the equality sign above apply?
4.7 Givena+b+e+d=0, which of the folowing statements
are correct :
(a) a, b, c, and d must each be a null vector,
(b) The magnitude of (a+c) equals the magnitude of
(b+),
(c) The magnitude of a can never be greater than the
sum of the magnitudes of b, e, and d,
(d) b + & must lie in the plane of a and d if a
and d are not collinear, and in the line of a and @, if they are
collinear ?
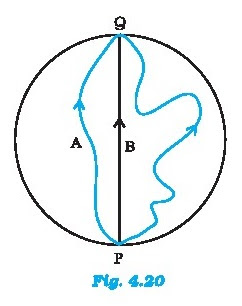
4.8 Three girls skating on a circular ice ground of
radius 200 m start from a point P on the edge of the ground
and reach a point Q diametrically opposite to
Pfollowing different paths as shown in Fig. 4.20. What is the
magnitude of the displacement vector for each ? For
which girl ia this equal to the actual length of path skate?
4.9 Acyciiat starts from the centre O of a circular
park of radiue 1 kon, reaches the edge P of the park, then cycles along the
circumference, and returns to the centre along QO as shown in Fig. 4.21. If the
round trip takes 10 min, what is the (a) net displacement,
(b} average velocity, and (c) average speed of the
cyclist 7
4.10 On an open ground, a motorist follows a track
that turns to his left by an angle of 60° after every 500 m. Starting from a
given turn, specify the displacement of the motorist at the third, sixth and
eighth turn. Compare the magnitude of the displacement with
the total path length covered by the motoriat in
each case.
4.11 A passenger arriving in a new town wishes to go
from the station to a hotel located 10 km away on a straight road from the station.
A dishonest cabman takes him along a circuitous path 23 km long and reaches the
hotel in 28 min. What is (a) the average speed of the taxi, (b) the magnitude
of average velocity ? Are the two equal ?
4.12 Rain ts falling vertically with a speed of 30 m
5". A woman rides a bicycle with a speed of 10 ms" in the north to
south direction. What is the direction in which she should hold her umbrella ?
4.13 A man can swim with a speed of 4.0 km/h in
still water. How long does he take to crosa a river 1.0 km wide if the river
flows steadily at 3.0 km/h and he makes hia
strokes normal to the river current? How far down
the river does he go when he
reaches the other bank ?
4.14 In a harbour, wind is blowing at the speed of
72 km/h and the flag on the mast of a boat ++++++++++++++
.....+
.+ anchored m the harbour fiutters along the N-E
direction. If the boat starts moving at a speed of 51 km/h to the north, what
is the direction of the flag on the mast of the boat ?
4.16 The ceiling of a long hall is 25 m high. What
is the maximum horizontal distance that a ball thrown with a speed of 40
ms" can go without hitting the ceiling of the hall ?
4.16 A cricketer can throw a ball to a maximum
horizontal distance of 100 m. How much high above the ground can the cricketer
throw the same ball ?
4.17 A stone tied to the end of a string 80 cm long
is whirled in a horizontal circle with a constant speed. If the stone makes 14
revohitions m 25 «, what is the magnitude and direction of acceleration of the
stone ?
4.18 An aircraft executes a horizontal loop of
radius 1.00 km with a steady speed of 900 km/h. Compare ita centripetal
acceleration with the acceleration due to gravity.
4.19 Read each statement below carefully and state,
with reasons, if it is true or false :
fa) The net acceleration of a particle in circular
motion is always along the radius of the circle towards the centre
(b) The velocity vector ofa particle at a point is
ahways along the tangent to the path of the particle at that point
(c) The acceleration vector of a particle in uniform
circular motion averaged over one cycle ia a null vector
4.20 The position of a particle is given by
r= 3.0(1-2.07 j+4.0kim
where ¢is in seconds and the coefficienta have the
proper unite for rto be in metres.
{a) Find the v and a of the particle? (b) What is
the magnitude and direction of velocity of the particle at t= 2.0 5 ?
4.21 A particle starts from the origin at t= 0 a
with a velocity of 10.0 j m/s and moves in the x-y plane with a constant
acceleration of (8.01 +2.0)) m s*, (a) At what time is the x coordinate of the
particle 16 m? What is the y-coordinate of the particle at that time? (b) What
is the speed of the particle at the time ?
4.22 | and j are unit vectors along x- and y axia
respectively. What is the magnitude and direction of the vectors i+}: and j-j ?
What are the components of a vector Az 2 i+3j along the directions of i+j and
i-j? [You may use graphical method]
4.23 For any arbitrary motion in apace, which of the
following relations are true :
fa) Vacage = (1/2) ( (4) + ¥ (G)
{D) Yee = Inte) - (4) 1 /(Q-t)
fc) ¥(G@ =" (O)+at
{d) # (4 = ¢ (©) + ¥ (0) t+ (1/2) a
{2 a ae = YG) - v0 - 6)
{The ‘average’ standa for average of the quantity
over the time mterval ¢, to 4)
4.24 Read cach statement below carefully and state,
with reasons and cxamples, if it is true or false :
A scalar quantity is one that
{a} is conserved in a process
{b) can never take negative values
{c) must be dimensionless
{d) does not vary from one point to another in space
{Q has the same value for observers with different
orientations of axes.
4.26 An aircraft is flying at a height of 3400 m
above the ground. If the angle subtended at a ground observation point by the
aircraft poaitions 10.0 5 apart is 30°, what is the speed of the aircraft ?
Additional Exercises
4.26 A vector has magnitude and direction. Does ft
have a location in space ? Can it vary with time ? Will two equal vectors a and
b at different locations in space necessarily have identical] physical effects
? Give examples in support of your answer.
4.27 A vector has both magnitude and direction. Does
it mean that anything that has Magnitude and direction is necessarily a vector
? The rotation of a bedy can be specified by the direction of the axis of
rotation, and the angle of rotation about the axis. Doea
that make any rotation a vector ?
4.28 Can you associate vectors with (a) the length
of a wire bent into a loop, (b) a plane area, (c} a sphere ? Explain.
4.20 A bullet fired at an angle of 30° with the
horizontal hits the ground 3.0 km away. By adjusting its angle of projection,
can one hope to hit a target 5.0 lan away ? Assume the muzzle speed to be
fixed, and neglect air resistance.
4.30 A fighter plane flying horizontally at an
altitude of 1.5 km with speed 720 km/h passes directly overhead an
anti-aircraft gun. At what angle from the vertical ahould the gun be fired for
the shell with muzzle speed 600 m s" to hit the plane ? At what minimum
altitude should the pilot fly the plane to avoid being hit ? (Take g = 10 m 8).
4.31 A cyclist is riding with a speed of 27 km/h. As
he approaches a circular turn on the road of radtue 80m, he applies brakes and
reduces his speed at the constant rate of 0.50 m/a every second. What is the
magnitude and direction of the net acceleration of
the cyclist on the circular turn ?
4,32 (a) Show that for a projectile the angle
between the velocity and the x-axis as a function of time is given by
a= wane")
Cox
(b) Shows that the projection angle 06, for a
projectile launched from the origin is given by
af 4h
= tan!
anew (Te)
where the symbole have their usual meaning.
8.2 ARISTOTLE’S FALLACY
The question posed above appears to be
simple.However, it took ages to answer it. Indeed, the correct answer to this
question piven by Galfleo in the seventeenth century was the foundation
of Newtonian mechanics, which signalled the birth of
modern science.
The Greek thinker, Aristotle (384 B.C- 322 B.C,),
heki the view that if a body is moving,something extemal is required to keep it
moving.According to this view, for example, an arrow shot from a bow keeps
flying since the air behind
the arrow keeps pushing it. The view was part of an
elaborate framework of ideas developed by Aristotle on the motion of bodies in
the universe.Most of the Aristotelian ideas on motion are now
known to be wrong and need not concern us.For our
purpose here, the Aristotelian law of motion may be phrased thus: An external
force
is required to keep a body in motion.
Aristotelian law of motion is awed, as we shall see.
However, It is a natural view that anyone would hold from common experience.
Even a small child playing with a simple (non-electric)toy-car on a floor knows
intuttively that it needs
to constantly drag the string attached to the
toy-car with some force to keep it gaing. If it releases the string, it comes
to rest. This experience is
common to most terrestrial motion. External forces
seem to be needed to keep bodies in motion. Left to themselves, all bodies
eventually
come to rest.
What is the flaw in Aristotle's argument? The answer
is: a moving toy car comes to rest because the external force of friction on
the car by the floor opposes its motion. To counter this force, the child has
to apply an external force on the car in the
direction of motion. When the car is in uniform
motion, there is no net external force acting on tft:the force by the child
cancels the force { friction)
by the floor. The corollary is: tithere were no
friction,the child would not be required to apply any force to keep the toy car
in uniform motion.
The opposing forces such as friction {solids)and
viscous forces {for flukis) are always present in the natural workd. This
explains why forces by external agencies are necessary to overcame
the frictional forces to keep bodies in untform
motion. Now we understand where Aristotle went wrong. He coded this practical
experience in the form of a basic argument. To get at the

























